|
Préparation à ECE : Décalage Doppler :
1.
Comparaison des
valeurs des fréquences mesurées lorsque le véhicule est à l’arrêt puis
en mouvement.
-
Schéma de la
situation :

-
Au temps
t1 = 0 s, le
signal sonore de fréquence fE,
émis par l’émetteur (E) se déplace à la célérité
vson.
-
La distance
parcourue par l’onde est d.
-
Date t2
à laquelle le signal est reçu par le récepteur R :
-

-
L’émetteur se
déplace à la vitesse v dans le référentiel terrestre :
- à la date TE, l'émetteur émet un nouveau sugnal.
-
L'émetteur parcourt la
distance d1 pendant la durée d’une période
TE.
-
d1 = v .
TE
-
L’émetteur
E se rapproche de la distance
d1 du récepteur
R
-
Il se trouve à la
distance :
-
d’ = d – v .
TE
-
Le nouveau signal
arrive à la date t3
au niveau du récepteur R :
-

-
TR = t3 –
t2
-
La grandeur
TR représente la
période du signal reçu par le récepteur
R.
-

-
En faisant
intervenir les fréquences :
-

-
Décalage Doppler :
-
Le décalage Doppler
est noté :
-
Δf = fR –
fE
-

-
Pourquoi donne-t-on
la relation suivante ?
-

-
On considère que :
-
La vitesse de
déplacement du véhicule est très petite devant la célérité du son dans
l’air :
-
v <<
vson.
-
Ainsi :
vson – v ≈
vson
-

-
Décalage Doppler et
signe :
-
Comme
vson >
v => vson – v > 0
-
Le décalage Doppler
est positif :
-
La fréquence
fR du son reçu par le récepteur est supérieure à la
fréquence fE émise
par l’émetteur.
-
Le son entendu est
plus aigu que celui émit.
-
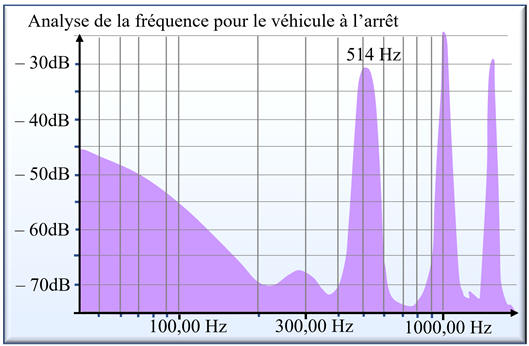
Exploitation des
spectres :
-
Lorsque le véhicule
est à l’arrêt, la fréquence du son émis est la même que la fréquence du
son reçu,
c’est la fréquence
-
fE = 514 Hz.
-
Schéma de la
situation :

-
Lorsque le véhicule
est en mouvement à la vitesse v
et qu’il se rapproche du récepteur,
-
La fréquence émise
par l’émetteur est toujours :
-
fE = 514 Hz.
-
Mais la fréquence
reçue par le récepteur est différente, elle est supérieure :
-
fR = 528 Hz.
-
Schéma de la
situation :
-
On peut en déduire
la valeur du décalage Doppler :

-
Δf = fR –
fE
-
Δf ≈
528 – 514
-
Δf ≈ 14,0 Hz
-
Δf > 0
-
Ce résultat est
bien en accord avec le fait que le véhicule (émetteur
E ) se rapproche du récepteur
(R).
2.
Valeur de la
vitesse de déplacement du véhicule en m .s–1.
-
-
De cette relation,
on tire celle donnant la vitesse du véhicule v en fonction de fR,
fE et vson.
-

-
Application
numérique :
-

a.
Sources d’erreurs
possibles lors de cette détermination.
-
La principale
source d’erreur provient de la position du récepteur.
-
Pour simplifier
l’étude et réaliser des mesures correctes,
il faut positionner le
récepteur dans l’axe du mouvement.
-
Les radars qui
permettent le contrôle de la vitesse sont situés sur le bord de la
route.
-
Comme autre source
d’erreur, il y a la vitesse de propagation du son dans l’air.
-
La valeur de la
célérité du son dans l’air dépend des conditions extérieures
(température, pression, …).
-
La vitesse du son
est très sensible à la température
θ :
-

-
Il se peut que la
température ne soit pas homogène sur le parcours du signal.
-
On peut aussi avoir
une erreur sur la mesure de la fréquence de réception du son.
b.
La personne
conduisant le véhicule peut-elle être verbalisée ?
-
La zone est limitée
à 30 km . h–1
-
On exprime la
valeur de la vitesse du véhicule en km . h–1
-
v ≈ 9,37 m . s–1
-
v ≈ 9,37 × 3,6
-
v ≈ 33,6 km . h–1
-
v
≈ 34 km . h–1
-
v > 30 km . h–1
-
Le conducteur est
verbalisable.
►
Remarque :
-
La vitesse retenue
après un flash est inférieure à la vitesse relevée.
-
Les mesures de
vitesses réalisées par les radars comportent des imprécisions.
-
Pour écarter toute
erreur possible, on retranche une certaine valeur à la mesure réalisée.
-
Ainsi, pour une
vitesse inférieure à 100 km . h–1, on diminue la valeur de la
vitesse enregistrée de 5 km . h–1.
-
Dans le cas
présent, la vitesse retenue est :
-
vr ≈ 34 – 5
-
vr ≈ 29 km . h–1.
-
Le conducteur ne
sera pas verbalisé.
-
Au-dessus de 100 km
. h–1, il faut réduire de
5 % la valeur
de la vitesse relevée par le radar.
►
La marge
technique :
-
La "marge
technique" est la marge d'erreur avec laquelle est observée la vitesse
enregistrée.
-
En dessous de 100
km . h–1, une marge de 5 km . h–1 est décomptée de
la vitesse enregistrée,
à l’avantage du conducteur.
-
Pour les
limitations au-dessus de 100 km . h–1, la marge est de 5 %,
également prise en compte à l’avantage du conducteur.
|