|
Mouvement dans un champ uniforme |
|
|
|
|
|
|
Préparation à l’ECE : Mouvement d’une balle |
|
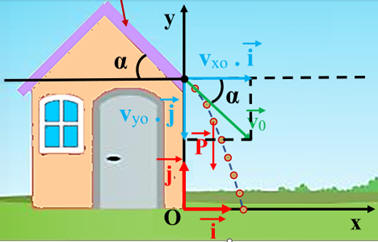
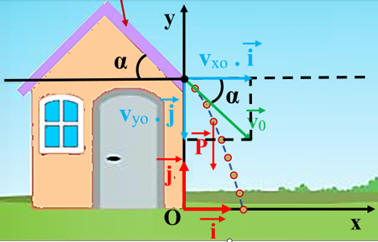
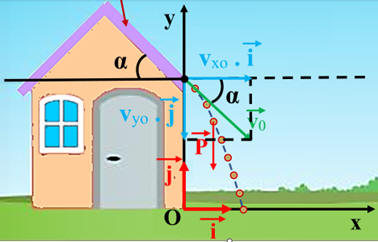
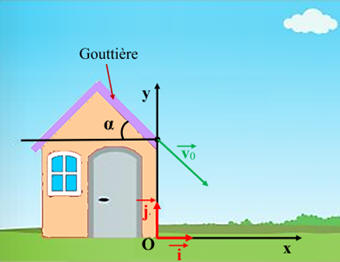
Préparation à l’ECE : Mouvement d’une balle : On étudie, dans un référentiel terrestre supposé galiléen, le mouvement d’une balle de masse m = 50 g, assimilée à son centre de passe G, lâchée d’une gouttière d’une cabane de jardin dont la direction fait
un angle α avec l’horizontale. Lorsqu’elle quitte la gouttière à la date t = 0 s, la balle a
une vitesse initiale
Le repère
On suppose que l’action de l’air est négligeable. On enregistre la vidéo de la chute de la balle.
1.
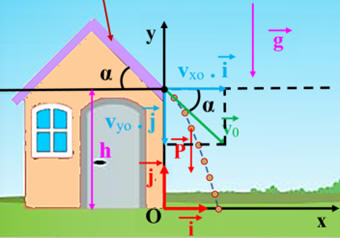
En appliquant la deuxième loi de Newton,
déterminer les coordonnées cartésiennes des vecteurs accélération, vitesse et position de la balle à
chaque instant. 2.
Proposer un traitement informatique, à partir de
la vidéo, permettant d’obtenir les courbes ci-dessous.
3.
Déduire de ces courbes :
-
La hauteur
h de départ ;
-
La valeur
v0 de la vitesse
initiale ;
-
La valeur de l’angle α. |
![]()
![]()
|
Préparation à l’ECE : Mouvement d’une balle : 1.
Détermination des
coordonnées cartésiennes des vecteurs accélération, vitesse et position
de la balle à chaque instant.
-
Système d’étude : la balle :
S
= {G,
m}
-
Bilan des
forces : le poids
-
Représentation à l’instant
t :
-
Deuxième loi
de Newton :
-
Repère
d’étude : Repère terrestre supposé galiléen :
-
-
Dans le cas
présent :
-
-
Coordonnées
des différents vecteurs :
-
-
Application de
la deuxième loi de Newton :
-
-
Coordonnées du
vecteur accélération :
-
Détermination
du vecteur vitesse.
-
-
Le vecteur
accélération
-
La
détermination du vecteur vitesse nécessite de rechercher la primitive
par rapport au temps de chaque coordonnée du vecteur accélération en
tenant compte des conditions initiales.
-
On cherche les
primitives des équations précédentes.
-
Il apparaît
des constantes qui sont liées aux conditions initiales.
-
Les constantes
d’intégration apparues dans les primitives sont liées aux conditions
initiales :
-
C’est-à-dire
aux coordonnées du vecteur vitesse
-
-
Coordonnées du
vecteur position
-
Le vecteur
vitesse
-
La
détermination du vecteur position nécessite de rechercher la primitive
par rapport au temps de chaque coordonnée du vecteur vitesse en tenant
compte des conditions initiales.
-
C’est-à-dire
aux coordonnées du vecteur position
►
Équation de la
trajectoire :
-
En éliminant le temps
t dans l’expression de
y,
on retrouve l’équation de la trajectoire de la courbe décrite par la
balle :
-
- 2.
Traitement
informatique, à partir de la vidéo, permettant d’obtenir les différentes
courbes.
-
On peut
utiliser une application de traitement vidéo comme
-
Latis-Pro
-
ou
AviMéca v.2.7.
-
Exemple d’utilisation avec
Latis-Pro :
-
On ouvre
l’application :
-
On clique sur
-
On sélectionne
l’origine, l’étalon pour pouvoir effectuer les mesures et le sens des
axes.
-
Enfin, on
effectue la sélection manuelle des différents points :
-
On commence la
prise de valeurs lorsque la balle quitte la main.
-
On obtient
l’affichage suivant en cliquant sur ‘Animation’.
-
Cliquer sur
‘Liste des Courbes’
-
Les glisser
vers la surface active du repère.
-
On peut régler
les axes pour utiliser au mieux l’écran.
-
On peut
déplacer le repère.
-
Cliquer sur
modélisation :
-
Puis glisser
la courbe à modéliser
-
Puis choisir
un modèle :
-
Pour X, on
choisit linéaire.
-
On sélectionne
l’intervalle,
-
Puis on clique
sur ‘Calculer le modèle’ : puis sur
-
Réaliser la
même opération pour le mouvement de Y :
-
On sélectionne
‘Polynôme’ ou ‘Parabole’ :
-
Avec
‘Parabole, on obtient le résultat suivant :
-
On peut
éliminer le dernier point.
-
Puis on clique
sur ‘Calculer le modèle’ : puis sur
-
On obtient le
résultat suivant :
-
Les deux
courbes s’affichent :
-
On peut
sélectionner ‘Tableur’ :
-
Créer une nouvelle variable choisir
t
et secondes (s) comme unité :
-
On entre la
première valeur : 0,0, puis 0,04 et on recopie vers le bas tant que
nécessaire.
-
On fait
glisser les valeurs du mouvement de X dans la colonne suivante, puis les
valeurs du mouvement de Y :
-
On obtient le
tableau suivant : (on a supprimé les deux dernières valeurs).
-
On peut
enlever les unités, en cliquant sur
-
On peut
exploiter ce tableau dans un autre tableur comme Excel. 3.
Détermination des
différentes équations :
-
Le tableau de
valeurs :
-
Équation des
différentes courbes :
-
Détermination de
y =
f
(t)
et x =
g
(t) :
-
On remarque que le coefficient de détermination
R2
est proche de 1.
-
R2
≈ 0,9997 ≈ 1 et
R2
≈ 0,9998 ≈ 1
-
Le modèle
choisi dans chaque cas est bien en adéquation avec les données
expérimentales.
-
Coordonnées du
vecteur position
-
Exploitation des graphes :
vy
= f1
(t)
et vx
= g1
(t).
-
Coordonnées du
vecteur vitesse
-
La hauteur
h de départ :
-
C’est l’ordonnée à l’origine, c’est-à-dire la valeur de
y
au temps t = 0 s
-
y
(0)
≈ – 4,88 (0)2
– 0,677
(0)
+ 0,869
-
h
= y
(0)
≈ 0,869 m
-
h
= y
(0)
≈ 0,87 m
-
La valeur
v0
de la vitesse initiale :
-
-
À partir des
courbes :
-
Expression de
la valeur initiale de la vitesse :
-
-
Application
numérique :
-
-
v0
≈ 1,5 m . s–1
-
La valeur de l’angle
α :
-
Expression de tan
α :
-
-
α
≈ 30 °
-
Représentation de
y =
h
(x) :
-
On obtient une
portion de parabole d’équation :
-
y
≈ – 3,42 x2
– 0,597 x
+ 0,869
-
Équation à
rapprocher de la relation suivante :
-
-
On retrouve :
-
h
≈ 0,869 m ≈ 0,87 m
-
tan
α ≈ 0,597 =>
α
≈ tan–1 (0,597)
-
α
≈ 30,8 °
-
α
≈ 31 °
-
On retrouve la valeur de
v0 :
-
-
Les valeurs
trouvées sont en accord avec celles calculées précédemment. |
![]()
![]()
|
|


 ;
;
 ;
;