|
Chim. N° 09 |
Description des mouvements. Exercices. |
|
|
1)- Exercice 4 page 160 : Choisir le bon référentiel.
|
Énoncé : Choisir le bon référentiel :
-
Associer à chaque mouvement le
référentiel le mieux adapté :
|
|
Correction : Choisir le bon référentiel :
-
Le référentiel le mieux adapté :
-
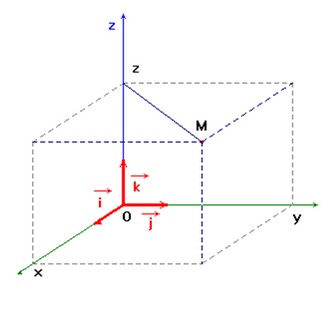
Le mouvement d’un système est
toujours décrit par rapport à un objet de référence, appelé
référentiel.
-
Un référentiel est un solide par
rapport auquel on étudie le mouvement d'un mobile ou système.
- Référentiel lié au sol : Référentiel terrestre ou Référentiel du laboratoire. - Ce référentiel est bien commode pour l’étude du mouvement des objets dans une salle de classe, pour tous
les mouvements qui
s’effectuent au voisinage de la terre
-
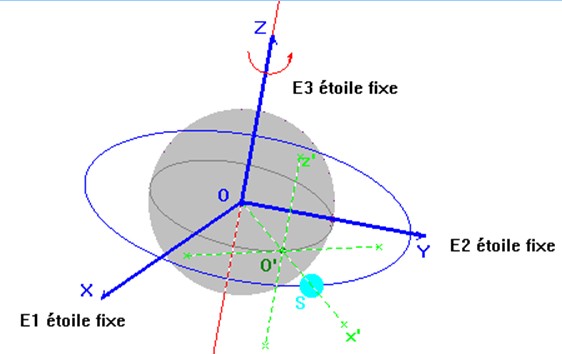
Référentiel lié au centre de la
Terre : Référentiel géocentrique - C’est un solide imaginaire constitué par le centre T de la Terre et de 3 axes d’origine T
parallèles aux
directions de
trois étoiles lointaines fixes.
-
Ce référentiel est commode pour
l’étude des satellites de la Terre. |
![]()
2)- Exercice 8 page 161 : Trajectoire et référentiel :
|
Énoncé : Trajectoire et référentiel : Une dépanneuse tracte un véhicule et roule en
ligne droite. Le système étudié est le véhicule en panne. 1.
Citer deux référentiels pouvant être choisis
pour étudier le mouvement. 2.
Décrire le mouvement du système par rapport
à chacun des référentiels. |
|
Correction : Trajectoire et référentiel : Une dépanneuse tracte un véhicule et roule en ligne droite.
1.
Les deux référentiels choisis pour étudier
le mouvement.
-
Le système étudié est le véhicule en
panne.
-
Comme référentiel, on peut choisir :
-
La route sur laquelle se déplace le
véhicule (référentiel terrestre)
-
La dépanneuse qui tire le véhicule. 2.
Le mouvement du système par rapport à chacun
des référentiels.
-
Mouvement par rapport à la route :
-
Le véhicule se déplace d’un mouvement
rectiligne par rapport à la route (roule en ligne droite).
-
Mouvement par rapport à la
dépanneurs.
-
Le véhicule est immobile par rapport
à la dépanneuse.
-
Le mouvement d’un système est relatif
au référentiel d’étude. |
![]()
3)- Exercice 11 page 161 : Tracer des vecteurs déplacement.
|
Énoncé Tracer des vecteurs déplacement :
1.
Reproduire le schéma de la situation
ci-dessus, puis construire le vecteur
déplacement
2.
Comparer la distance M1M4
à la distance réellement parcourue par le système entre
M1 et M4. |
|
Correction : Mesure réalisée avec PhotoFiltre : Tracer des vecteurs déplacement :
1.
Le vecteur déplacement
2.
Comparer la distance M1M4
à la distance réellement parcourue par le système entre M1
et M4.
-
d (M1M4) ≈ 42,88 cm
-
Longueur du trajet de
M1 à M4 :
-
d (M1M2) ≈
13,39 cm
-
d (M2M3) ≈
15,89 cm
-
d (M3M4) ≈
15,20 cm
-
Valeur approchée du trajet
M1 à M4 :
-
dM1M4 ≈
d
(M1M2)
+ d
(M2M3)
+ d
(M3M4)
-
dM1M4 ≈
13,39 + 15,89 + 15,20
-
dM1M4 ≈
44,48 cm
-
Incertitude relative entre les valeurs des deux
mesures :
-
-
L’écart entre les deux valeurs n’est
pas significatif (dans ce cas).
-
Il peut être significatif dans
d’autres situations. |
![]()
4)- Exercice 14 page 161 : Caractériser un mouvement :
|
Énoncé Caractériser un mouvement :
-
Associer aux trois mouvements
ci-dessous la (ou les) caractéristiques(s) qui s’y rapporte(nt).
-
Mouvements : a.
b.
c.
-
Caractéristiques :
|
|
Correction : Caractériser un mouvement :
-
Caractéristiques de chaque
mouvement : a.
-
Mouvement
rectiligne
uniforme. b.
-
Mouvement
curviligne accéléré puis
décéléré. c.
-
Mouvement
rectiligne accéléré. |
![]()
5)- Exercice 26 page 164 : Exercice à caractère expérimental :
|
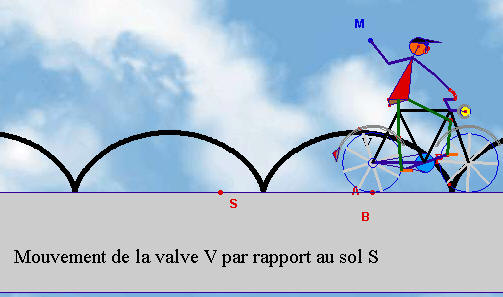
Énoncé Exercice à caractère expérimental Mouvement d’un vélo.
Les schémas suivants ont été obtenus par pointage de deux points d’un vélo au cours d’un mouvement. A.
Mouvement du centre C de la roue du
vélo par rapport au sol.
B.
Mouvement d’un point P de la roue par
rapport au centre C de la roue.
1.
Décrire le mouvement de C par rapport
au sol, puis le mouvement de P par rapport à C. 2. Reproduire les positions de C par rapport au sol sur une feuille de papier calque. Positionner le point C1 du papier calque au point C du schéma B et relever le point P1. Déplacer le papier calque en C2, en maintenant l’orientation de la feuille de papier calque, et relever P2. Faire de même jusqu’à C12
et P12. 3.
Décrire la trajectoire de P par
rapport au sol. 4.
Expliquer en quoi l’exercice illustre la
perte d’informations due à la modélisation du système par point. |
|
Correction : 1.
Le mouvement de C par rapport au sol,
-
Le point C parcourt des
distances égales pendant des durées égales et d’autre part les points sont alignés.
-
Le point
C est animé d’un
mouvement rectiligne uniforme par rapport au sol.
-
Mouvement de
P par rapport à C :
-
Le point
P parcourt des distances
égales pendant des durées égales et d’autre part, le point P est
toujours à la même distance du point
C.
-
Le point
P est animé d’un
mouvement circulaire uniforme. 2.
Mouvement de
C par rapport au sol :
-
Le point
C apparaît en rouge et
les différentes positions du point
P en vert.
-
Position 1
-
Position 2 et ainsi de suite :
-
Le mouvement de
P par rapport à C
apparaît en bleu.
3.
Trajectoire de P par rapport au sol.
-
Le mouvement du point
P par rapport au sol est curviligne varié.
-
La trajectoire est une portion de
cycloïde. - Vidéo :
-
Autre exemple : 4.
La perte d’informations due à la
modélisation du système par point.
-
Si on étudie le système vélo, on
s’aperçoit que les points C
et P de ce système n’ont pas le même mouvement.
-
En ramenant l’étude d’un système à un
point, on perd des informations sur le mouvement général du système.
-
Le fait de modéliser le système à un
point ne permet pas de connaitre le mouvement d’ensemble du système.
-
Cette modélisation permet toutefois
de simplifier l’étude du mouvement du système. |
![]()
6)- Exercice 31 page 165 : Un saut record :
|
Énoncé Un saut record : Le 4 août 2015, Laso Schaller a établi un nouveau record du monde du plongeon de haut vol. Le sportif suisse s’est élancé d’une plate-forme à 58,80 mètres de hauteur au-dessus d’une cascade, la Cascada del Salto, pour plonger dans un petit bassin de celle-ci […]. Un exploit qui l’a vu entrer dans l’eau à la vitesse de 122 km / h après 4 secondes de chute. D’après France soir, édition du 20 août 2015. Document :
1.
Commenter l’évolution du vecteur vitesse
entre les positions M2 et M3. 2.
Donner la nature du mouvement du sauteur
entre ces deux positions. 3.
Comparer la valeur de la vitesse en M5
et celle au moment de l’entrée dans l’eau. Les résultats sont-ils
cohérents ? |
|
Correction : Document :
1.
Évolution du vecteur vitesse entre les
positions M2 et M3.
-
Entre deux instants voisins, le
vecteur vitesse garde la même direction et le même sens,
mais sa valeur augmente. 2.
Nature du mouvement du sauteur entre ces
deux positions.
-
On est en présence d’un mouvement
rectiligne accéléré. 3.
Comparaison de la valeur de la vitesse en
M5 et celle au moment de l’entrée dans l’eau.
-
Mesure 1 : elle donné l’échelle de
l’image :
-
20 m . s–1 ↔
1,94 cm
-
Mesure 2 :
-
Longueur du représentant du vecteur
vitesse V5 :
-
ℓ (V5)
≈ 2,47 cm
-
Échelle de l’image : 20 m . s–1
↔ 1,94 cm (voir : mesure 1)
-
Valeur de la vitesse en
M5 :
-
-
Pour avoir le résultat en km . h :
-
v5 ≈ 25 × 3,6
-
v5 ≈ 90 km / h
-
Cela semble cohérent, car il lui
reste plus de 20 m à parcourir pour atteindre les 122 km / h.
-
Remarque : les mesures ne sont pas
d’une grande précision. |
![]()
7)- Exercice 33 page 166 : Le saut en parachute (DS 40 min).
|
Énoncé Le saut en parachute : Entre le saut depuis un hélicoptère en vol stationnaire et son arrivée au sol, la vitesse du parachutiste, mesurée par rapport au sol, évolue au cours du temps. La chute se fait initialement
parachute fermé. A.
Évolution de la valeur de la vitesse du
parachutiste au cours du temps.
B.
Quelques positions du parachutiste. C.
Les positions du parachutiste sont repérées
par rapport au sol toutes les 5 secondes à partis du début
du saut à t = 0 s.
1.
Étude du système :
a. Expliquer en quoi il est pertinent ici de
modéliser le système par un point. b. Une échelle de distance en kilomètre
serait-elle adaptée pour le pointage
B. ? c. Dans quel référentiel les valeurs de la vitesse ont-elles été mesurées ? Changeraient-elles si elles
étaient mesurées par rapport à l’hélicoptère en vol stationnaire ? 2. Repérer sur le graphique
A. trois phases distinctes du
mouvement du parachutiste et préciser pour
chacune la nature du mouvement. 3. Reproduire le pointage
B. et construire dans la
position P1
le vecteur vitesse
On utilisera l’échelle : 1
cm ↔ 20 m . s–1. 4. En déduire que, lors de la première phase,
le mouvement est rectiligne accéléré. 5. Vitesse et distance : a. Rappeler la définition du vecteur vitesse
moyenne du système et le comparer à son vecteur
vitesse lors de la dernière phase. b. Calculer la distance parcourue par le
parachutiste lors de cette phase. |
|
Correction : Le saut en parachute : 1.
Étude du système : a.
Modélisation du système par un point :
-
Modéliser le système par un point
permet d’en simplifier l’étude.
-
On peut considérer que le
parachutiste est animé d’un mouvement de translation rectiligne.
-
Dans ce cas, il n’y aura pas de perte
d’information si l’on ramène l’étude du système à celle de l’un de
ses points. b.
Échelle de distance pour le pointage
B.
-
Le saut dure 35 s.
-
Distance parcourue les 15 premières
secondes : d15:
-
Mesures réalisées avec Word :
-
-
Le parachutiste parcourt quelques
centaines de mètres.
-
Une échelle en kilomètre n’est pas
adaptée pour cette étude. c.
Référentiel d’étude :
-
« la vitesse du parachutiste, mesurée
par rapport au sol »
-
Le référentiel d’étude est le sol. - Si on choisit comme référentiel d’étude, l’hélicoptère en vol stationnaire,
on obtient les mêmes
valeurs pour la vitesse du parachutiste.
-
Dans ce cas l’hélicoptère est
immobile par rapport au sol. 2.
Les différentes phases du mouvement du
parachutiste :
-
On peut distinguer 3 phases :
-
1ier phase : mouvement
accéléré : sa durée est d’environ 22 s.
-
On remarque que pendant cette phase
la vitesse augmente, puis tend vers une valeur limite.
-
vlim1 ≈ 54 m . s–1.
-
2e phase : mouvement
ralenti ; sa durée est d’environ 8 s. - La vitesse diminue au cours de cette phase. - Elle correspond à l’ouverture du parachute.
-
La vitesse tend vers une valeur
limite vlim2 ≈ 7,4 m . s–1.
-
3e phase : mouvement
uniforme : sa durée est de 5 s environ. - La vitesse est constante au cours de cette phase : - v ≈ 7,4 m . s–1.
-
Tableau de valeurs :
3.
Tracé des vecteurs vitesses :
-
Échelle : 1 cm ↔
20 m . s–1.
-
Valeurs des vitesse. - On réalise une exploitation graphique.
- Le parachutiste occupe la position P1
au bout de 5 s et P2 au bout de 10 s.
-
v1 ≈ 40 m / s et
v2 ≈ 50 m / s
-
Longueurs des représentants :
-
ℓ (v1) ≈ 2,0
cm et ℓ (v1) ≈ 2,5 cm
-
Tracé :
4.
Le mouvement est rectiligne accéléré :
-
On remarque que les points P0,
P1, P2 et P3
sont alignés et v2 et supérieur à v1.
-
Les vecteurs vitesses gardent la même
direction et le même sens, mais leur valeur augmente. 5.
Vitesse et distance : a.
Définition du vecteur vitesse moyenne du
système :
-
Dans un référentiel donné, entre les
positions M et M’, le vecteur vitesse moyenne
-
Du vecteur déplacement
-
Par la durée Δt du parcours :
-
-
Vecteur vitesse lors de la dernière
phase :
-
Lors de la 3e phase, le
mouvement du système est un mouvement rectiligne uniforme.
-
Le vecteur vitesse moyenne est égal
au vecteur vitesse du système dans ce cas.
-
b.
Distance parcourue d par le
parachutiste lors de cette phase. - On connaît la vitesse du système pendant cette phase : - v ≈ 7 ,4 m / s - On connaît la durée du parcours : - Δt = (35 – 29,8)
-
d =
v .
Δt ≈ 7,4 × (35 – 29,8)
-
d ≈ 38 m |
![]()
|
|