|
complexes
|
Utilisation
pour la résolution
d’une
équation différentielle du deuxième ordre sans second membre |
|
|
|
|
|
3)- Écriture trigonométrique : |
|
II- Utilisation pour la résolution d’une équation différentielle. |
L’ensemble des nombres complexes est une extension de
l’ensemble des nombres réels.
![]()
-
La grandeur
i représente le
nombre imaginaire tel que :
-
i2
= – 1
-
Remarque : le carré de
(– i) est aussi égal à – 1.
-
(–i)2
= – 1
![]()
-
z
= a +
i . b
-
les nombres
a et
b sont des nombres
réels.
![]()
3)- Écriture trigonométrique :
-
z
= ρ . (cos
θ + i
. sin θ)
-
La grandeur ρ
: module du nombre complexe
-
La grandeur θ
: argument du nombre complexe
-
Conséquences :
-
a
= ρ . cos
θ et b
= ρ . sin
θ
-
![]()
-
 et
et
-
![]()
![]()
-
z
= ρ .
e i
. θ
-
Conséquences :
-
a
= ρ . cos
θ et b
= ρ . sin
θ
-
![]()
-
et
-
![]()
![]()
5)- Nombres complexes conjugués :
-
Le nombre complexe
conjugué, de z
= a +
i .
b, est ![]()
-
De même :
-
z
= ρ . (cos
θ + i
. sin θ) et
![]() sont des nombres complexes conjugués
sont des nombres complexes conjugués
-
z
= ρ .
e i
. θ
et
![]() sont
des nombres complexes conjugués.
sont
des nombres complexes conjugués.
►
Le complexe conjugué a
même partie réelle, mais une partie imaginaire opposée.
-
Propriété :
-
![]()
![]()
6)- Les fonctions trigonométriques : cosinus et sinus.
-
À partir des notations
suivantes :
-
z
= ρ . (cos
θ + i
. sin θ)
et z
= ρ .
e i . θ
-
On tire :
-
ei . θ
= cos θ +
i . sin
θ et e – i
. θ = cos
θ – i
. sin θ
-
On en déduit que :
-
![]()
- 
![]()
II-
Utilisation pour la
résolution d’une équation différentielle.
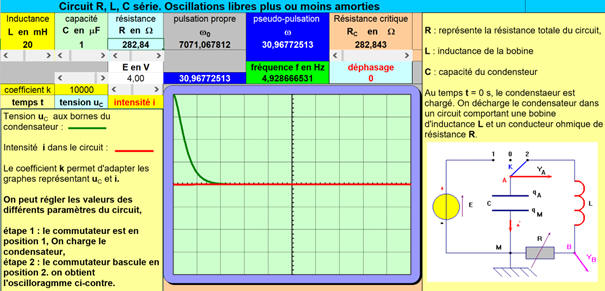
1)- Équation différentielle d’un circuit (R,
L, C).
-
Montage :
|
|
Premier
temps :
on charge
le
condensateur
en basculant
le
commutateur
sur
la position1. |
|
|
Deuxième temps :
au temps
t
= 0,
on bascule le
commutateur sur
la position 2 |
-
On utilise
l’additivité des tensions :
- 
-
On pose :
R
=
R’
+
r
et on ordonne :
-

-
Durant les
oscillations libres amorties, la charge
q
du condensateur obéit à l’équation différentielle :
-
![]()
-
Formulation générale :
-
-
On pose : ![]()
-
![]()
-
Le terme
λ est lié à
l’amortissement du système.
-
Le terme
ω02
est lié à la pulsation propre du système :
-
On obtient l’équation
générale suivante :
-
![]()
-
On retrouve cette
forme d’équation différentielle aussi bien en mécanique qu’en électricité.
![]()
-
On se place dans le
cas : λ = 0
-
On obtient l’équation
différentielle suivante :
-
![]() :
:
-
On recherche une
solution sous la forme suivante :
-
x
= A .
e α . t
-
On tire, l’expression
de la dérivée première :
- ![]()
-
Et de la dérivée
seconde :
-
![]()
- L’équation suivante doit être vérifiée ceci quel que soit x ( ∀ x)
-
- 
-
La solution générale
est une combinaison linéaire du type :
-
![]()
-
On fixe les conditions
initiales suivantes :
|
Au temps t
= 0 s |
x
= xm |
|
|
|
|
|
-
On en déduit les
relations suivantes :
-
-

-
On en déduit
l’expression de x
en fonction du temps :
-

► Autre méthode :
-
La solution générale est de la forme
suivante :
-
x =
A . (cos (ω0
. t)
+ i . sin (ω0
. t))
+ B . (cos (ω0
. t)
+ i . sin (ω0
. t))
-
(A + B)
. cos (ω0
. t)
+ i . sin (ω0
. t)
+ i . sin (ω0
. t).
(A –
B)
-
Comme
x est une réel :
-
(A + B)
€ R et (A
– B) est un
imaginaire pur.
-
Les grandeurs
A et
B sont des
complexes conjugués :
|
A
= a + i . b |
|
A
= ρ . e i . φ |
|
|
=> |
|
|
B
= a – i . b |
|
B
= ρ . e – i . φ |
-
Avec :
![]()
-
Expression de la solution générale :
-
x =
ρ .
e
i . φ .
e i . ω0 .
t + ρ
. e
–
i . φ .
e –
i . ω0 .
t
-
![]()
3)- L’amortissement n’est pas nul :
-
On se place dans le
cas : λ ≠ 0
-
On obtient l’équation
différentielle suivante :
-
![]() :
:
-
On recherche une
solution sous la forme suivante :
-
x
= A .
e α . t
-
On tire, l’expression
de la dérivée première :
- ![]()
-
Et de la dérivée
seconde :
- ![]()
-
L’équation suivante
doit être vérifiée ceci quel que soit x :
-

-
En conséquence :
-
![]()
-
On obtient une
équation du second degré en α :
-
On calcule de
discriminant réduit :
-
Δ’
= λ2
– ω02
![]()
a)-
1ier
cas : Δ’
> 0 : Régime apériodique. (λ
> ω0)
-
λ2
> ω02
-
On est dans le cas où
l’amortissement est grand.
-
On pose :
λ2
– ω02
= ω2
-
L’équation admet deux
solutions :
-
α’
= – λ + ω
et α’’
= – λ – ω
-
La solution générale
est une combinaison linéaire du type :
-

-
Les grandeurs
A et
B sont liées aux
conditions initiales :
-
On choisit comme
conditions initiales :
|
Au temps t
= 0 s |
x
= xm |
|
|
|
|
|
-
On en déduit les
relations suivantes :
-

-
Détermination de :
- 
- 
-
Il faut exprimer les
grandeurs A
et B en
fonction des caractéristiques du système λ,
ω et
xm.
-
Remarque : ne pas
oublier que λ2
– ω02
= ω2.
- 
-
On obtient la solution
générale suivante :
-

-
On peut l’écrire sous
la forme suivante :
-
 avec
λ >
ω0
avec
λ >
ω0
-
L’amplitude du système
décroit au cours du temps sans oscillations.
![]()
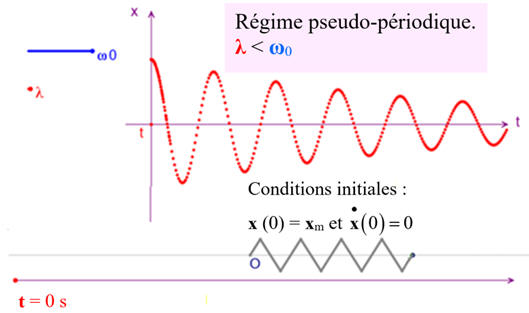
b)-
2ième
cas : Δ’
> 0 : λ2
< ω02 :
Régime pseudo-périodique (λ
< ω0)
-
λ2
– ω02
< 0 => ω02
– λ2
>0
-
On est dans le cas où
l’amortissement est faible.
-
Posons :
ω2
= ω02
– λ2
-
![]()
-
L’équation donne deux
solutions imaginaires :
-
α’
= – λ + i .
ω et α’’
= – λ – i . ω
-
La solution générale
est une combinaison linéaire du type :
- 
-
Les grandeurs
A et
B sont liées aux
conditions initiales :
-
On choisit comme
conditions initiales :
|
Au temps t
= 0 s |
x
= xm |
|
|
|
|
|
-
On en déduit les
relations suivantes :
- 
-
Détermination de
:
- 
- 
-
Il faut exprimer les
grandeurs A
et B en
fonction des caractéristiques du système λ,
ω et
xm.
-
Remarque : ne pas
oublier que ω2
= ω02
– λ2.
-

- Solution générale :
-

-  avec
λ <
ω0
avec
λ <
ω0
-
L’amplitude du système
décroit au cours du temps et on observe des oscillations.
-
On peut écrire
x sous deux autres
formes :
- ![]()
- ![]()
-
Les grandeurs
xm,
φ et
ϕ sont liées
aux conditions initiales.
-
La grandeur
xm
représente l’amplitude du système.
-
Les grandeurs
φ et
ϕ représentent la
phase à l’instant initial.
►
Remarque :
-
Si l’amortissement
λ est très
faible, alors ω ≈ ω0
-
La grandeur
ω représente la pseudo-pulsation.
-
On observe un régime
périodique amortie de pseudo-période ω.
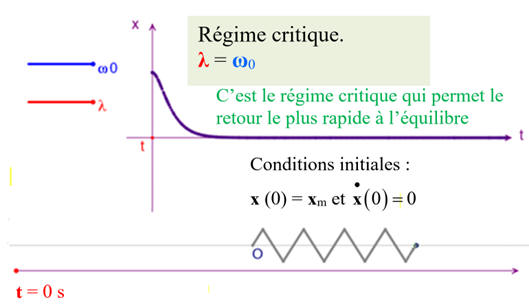
c)-
3ième
cas : Δ’
> 0 : Régime critique.
-
α’
= – λ
-
La solution générale
peut se mettre sous la forme suivante :
-
![]()
-
Expression de la
dérivée première :
- 
-
Expression de la
dérivée seconde :
-

-
L’équation générale
est la suivante :
- ![]()
-
On remplace
![]() par
leurs expressions respectives dans l’équation générale :
par
leurs expressions respectives dans l’équation générale :
-
-
On tire :
- ![]()
-
Cette équation est
vérifiée, si et seulement si :
-

-
Les constantes
A et
B dépendent des
conditions initiales :
-
On choisit comme
conditions initiales :
|
Au temps t
= 0 s |
x
= xm |
|
|
|
|
|
-
On en déduit les
relations suivantes :
- 
-
Au temps
t = 0 s,
x (0) =
xm.
-
x
(0) = xm
= A
- 
-
La fonction de
x est la suivante :
-
![]()
-
Expression de la
dérivée première :
-
-
Le système regagne sa
position d’équilibre le plus rapidement possible.
-
C’est l’amortissement
critique.
![]()
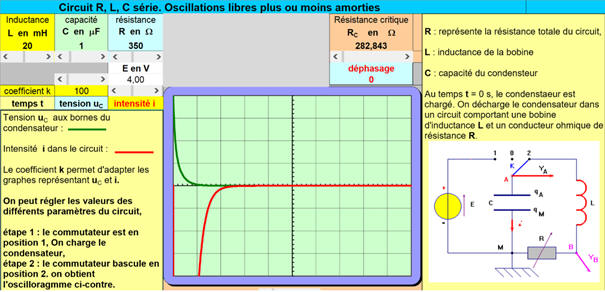
III-
Visualisation des
différents régimes :
-
Visualisation avec le
tableur Excel :

Simulation avec Excel :
Oscillations libres
amorties u, i,
-
Régime apériodique :
l’amortissement est grand, R
> RC
(résistance critique)
-
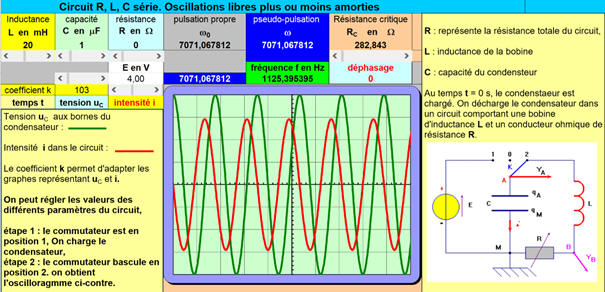
Régime
pseudo-périodique :

-
Si l’amortissement est
faible ( R =
1 Ω), la valeur de la pseudo-pulsation est proche de la période propre.
-
ω ≈ ω0
-
Si l’amortissement est
nul ( R = 0
Ω) , on observe des oscillations libres :
-
Régime critique :
R =
RC
(résistance critique)
![]()
Animation :
https://phyanim.sciences.univ-nantes.fr/Meca/Oscillateurs/Oscillat1_FJ.php
► Exemple de l’oscillateur mécanique horizontal :
Oscillateur mécanique horizontal : Le pendule élastique
-
Schéma :

Vidéo :

-
Régime
pseudo-périodique :

-
Régime apériodique :

-
Régime critique :
| Les phénomènes oscillants |
![]()

