|
TP Physique N° 10 bis |
Vecteur vitesse et vecteur accélération. Correction. |
|
|
|
|
Programme 2012 : Programme 2020 : |
|
Matériel : Ordinateur, table à digitaliser, stylet, mobile, table inclinée de 10 °, imprimante, Logiciel diginum 4 et fichier de mesures : TSSVT4 Masse du mobile : m = 536 g |
|
I -Expérience et enregistrement . II - Repère d'espace et repère de temps. |
I-
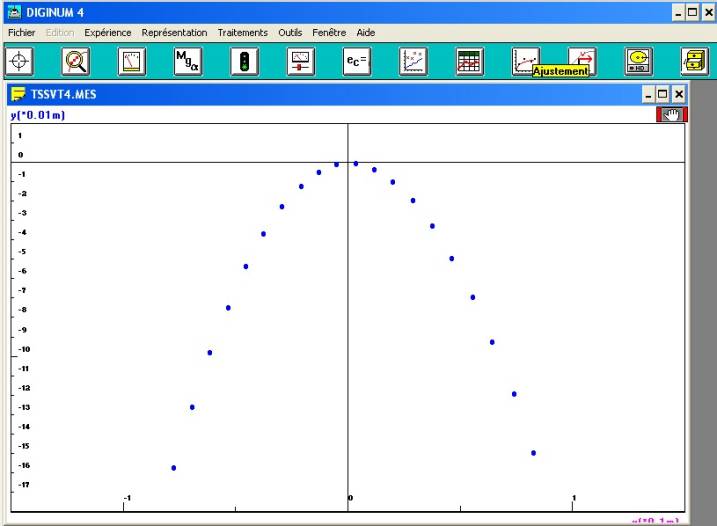
Expérience et enregistrement.![]()
1)- Décrire le dispositif utilisé informatique et mécanique.
- Partie mécanique :
on
utilise un plan incliné d’un
angle a
= 10 ° (environ)et
un mobile autoporteur de masse
m = 0,536
kg.
- Partie informatique : on utilise une table à digitaliser munie de son stylet.
- Le logiciel DIGINUM 4 permet l’étude du mouvement du mobile.
- La table à digitaliser permet de repérer la position d’un point particulier du mobile à intervalle de temps τ.
-
Dans le cas présent :
τ = 44,25 ms
- L’imprimante permet d’obtenir un enregistrement à l’échelle 1.
2)- Décrire l'expérience et faire des schémas du dispositif (vue de dessus et de profil).
II-
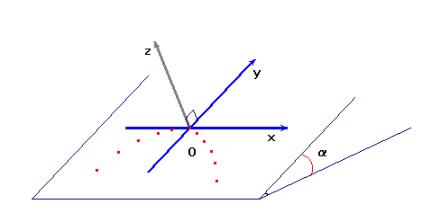
Repère d'espace et repère de temps.![]()
1)- Introduction.
L'ordinateur
impose le repère d'espace :
 .
.
On travaille en vraie grandeur.
L'ordinateur enregistre la position du stylet à intervalles de temps régulier τ.
Cet intervalle de temps est donné par l'ordinateur.
l'ordinateur choisit comme origine des dates, l'instant ou la position du point mobile coïncide avec l'origine des espaces O.
Le point O correspond au sommet de la trajectoire du point mobile. noter la valeur de tau : τ = 44,25 ms
Enregistrement :
2)- Coordonnées cartésiennes d'un vecteur.
- Pour connaître les coordonnées cartésiennes d'un vecteur, on projette ce vecteur sur les axes Ox et Oy.
- 
- Remarque : Rx et Ry sont des grandeurs algébriques.
3)- Le vecteur vitesse.
- Détermination de la valeur de la vitesse instantanée.
- Soit i = l'indice du point choisi :
- Les instants ti–1 et t i+1 encadrent l'instant ti.
- Tableau récapitulatif.
|
TSSVT 4 |
|
vecteur
vitesse |
|
||||||
|
|
groupe
N° 1 |
|
coordonnées |
|
coordonnées |
|
|||
|
|
point |
t en s |
|
vx
m/s |
vy m/s |
|
v m/s |
a
° |
|
|
|
1 |
-0,4248 |
|
|
|
|
|
|
|
|
|
2 |
-0,3805 |
|
0,1822 |
0,6715 |
|
0,6958 |
74,8 |
|
|
|
3 |
-0,3363 |
|
0,1822 |
0,5825 |
|
0,6104 |
72,6 |
|
|
|
4 |
-0,2920 |
|
0,1839 |
0,5034 |
|
0,5360 |
69,9 |
|
|
|
5 |
-0,2478 |
|
0,1785 |
0,4294 |
|
0,4650 |
67,4 |
|
|
|
6 |
-0,2035 |
|
0,1788 |
0,3489 |
|
0,3920 |
62,9 |
|
|
|
7 |
-0,1593 |
|
0,1876 |
0,2777 |
|
0,3351 |
56,0 |
|
|
|
8 |
-0,1150 |
|
0,1862 |
0,1989 |
|
0,2724 |
46,9 |
|
|
|
9 |
-0,0708 |
|
0,1802 |
0,1288 |
|
0,2215 |
35,6 |
|
|
|
10 |
-0,0266 |
|
0,1881 |
0,0545 |
|
0,1959 |
16,2 |
|
|
|
11 |
0,0177 |
|
0,1904 |
-0,0331 |
|
0,1933 |
-9,8 |
|
|
|
12 |
0,0620 |
|
0,1848 |
-0,1110 |
|
0,2155 |
-31,0 |
|
|
|
13 |
0,1062 |
|
0,1935 |
-0,1800 |
|
0,2643 |
-42,9 |
|
|
|
14 |
0,1504 |
|
0,1983 |
-0,2551 |
|
0,3231 |
-52,1 |
|
|
|
15 |
0,1947 |
|
0,1930 |
-0,3356 |
|
0,3871 |
-60,1 |
|
|
|
16 |
0,2389 |
|
0,2045 |
-0,4130 |
|
0,4609 |
-63,7 |
|
|
|
17 |
0,2832 |
|
0,2043 |
-0,4862 |
|
0,5273 |
-67,2 |
|
|
|
18 |
0,3274 |
|
0,2057 |
-0,5639 |
|
0,6002 |
-70,0 |
|
|
|
19 |
0,3717 |
|
0,2079 |
-0,6506 |
|
0,6830 |
-72,3 |
|
|
|
20 |
0,4159 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
![]() Mesurer la distance parcourue par le mobile :
Gi – 1
Gi + 1.
Mesurer la distance parcourue par le mobile :
Gi – 1
Gi + 1.
- Déterminer la durée de parcours Δt.
- En déduire la valeur de la vitesse vGi.
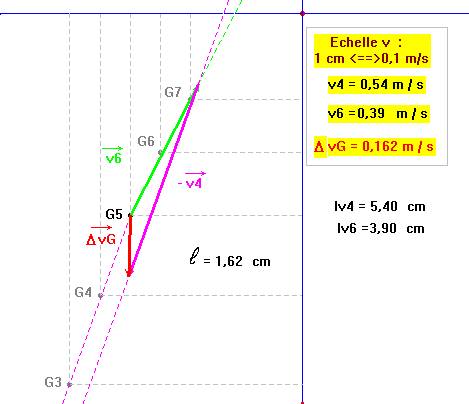
![]() Tracé du vecteur vitesse.
Tracé du vecteur vitesse.
- Tracer la parallèle issue du point Gi à la droite (Gi – 1 Gi + 1).
- Donner la longueur du représentant ℓvi du vecteur vitesse.
- On utilise l'échelle : 0,1 m / s ↔ 1 cm.
- Idem pour le point d’indice j.
|
Première étape de l'animation |
![]() Déterminer les coordonnées cartésiennes de chaque vecteur
vitesse. vérifier les valeurs à l'aide de l'ordinateur.
Déterminer les coordonnées cartésiennes de chaque vecteur
vitesse. vérifier les valeurs à l'aide de l'ordinateur.
- Voir les valeurs du tableau au-dessus.
III-
Force et variation de vitesse.![]()
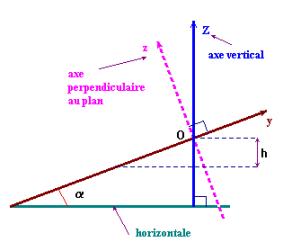
1)- bilan des forces extérieures appliquées un solide.
![]() Faire le bilan des forces extérieures appliquées au solide.
Faire le bilan des forces extérieures appliquées au solide.
- Faire un schéma de profil de la situation.
- schéma de profil de la situation.
- Représenter les actions mécaniques à partir du point G. On considère que les frottements sont négligeables.
- Décomposer les actions mécaniques suivant la perpendiculaire au plan incliné et la ligne de plus grande pente du plan incliné.
- Le mouvement a lieu dans le plan incliné, en conséquence, la somme vectorielle des composantes perpendiculaires au plan incliné est nulle.
- ![]()
- Tout se passe comme si le mobile n'était soumis qu'à la seule force
![]()
- En déduire les caractéristiques de la résultante
![]() :
:
- Direction : ligne de plus grande pente du plan incliné ; sens ; orienté vers le bas ; valeur :
- FR = m g sin a.
-
 .
.
- Donner les coordonnées de
![]() dans le repère :
dans le repère :
- Relations :
- coordonnées du vecteur résultante des forces :
2)- Vecteur variation du vecteur vitesse de G aux temps t5 et t14.
- Pour t5 :
- Rechercher les valeurs de vi –1 et vi + 1 à l'aide de l'ordinateur.
![]() Tracer le vecteur
Tracer le vecteur
![]() à partir du point Gi.
à partir du point Gi.
- Que représente ce vecteur ?
- Que peut-on dire du vecteur variation du vecteur vitesse de
G
et de la résultante
![]() des forces extérieures ?
des forces extérieures ?
- Pour t14 : Idem.
|
Deuxième étape de l' animation : Méthode 1 Tracer le représentant du vecteur
|
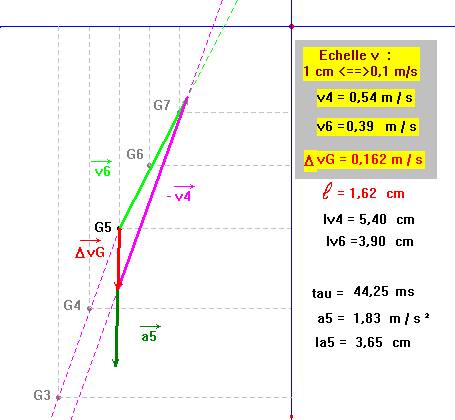
- Pour t5 :
- L’ordinateur donne : v4 ≈ 0,54 m / s et v6 ≈ 0,39 m / s
- Le vecteur
![]() représente la variation du
vecteur vitesse pendant un intervalle de temps très court de 2
τ.
représente la variation du
vecteur vitesse pendant un intervalle de temps très court de 2
τ.
- Il a même direction et même sens que la résultante des forces extérieures.
- Pour t14 :
- L’ordinateur donne : v13 ≈ 0,26 m / s et v15 ≈ 0,39 m / s
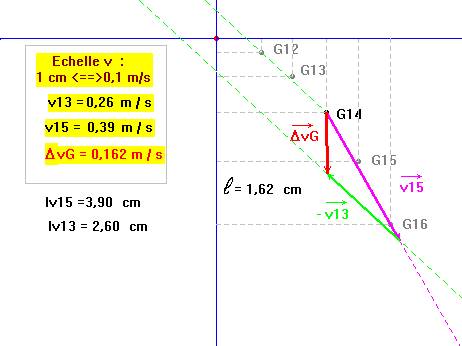
-
Le vecteur
![]() représente la variation du
vecteur vitesse pendant un intervalle de temps très court de 2
τ.
représente la variation du
vecteur vitesse pendant un intervalle de temps très court de 2
τ.
-
Il a même direction et même sens que la résultante
![]() des forces extérieures.
des forces extérieures.
1)- Introduction.
|
- Pour connaître le vecteur accélération du centre d’inertie G au temps ti, on détermine la variation du vecteur vitesse du point G pendant un intervalle de temps très court encadrant l'instant considéré. - Cela revient à utiliser la relation approchée :
|
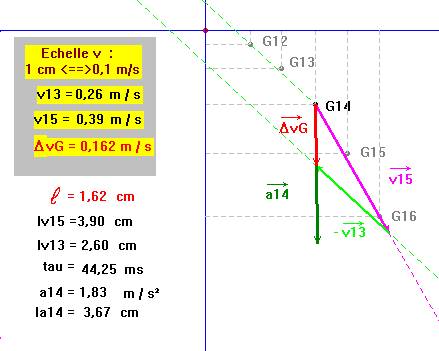
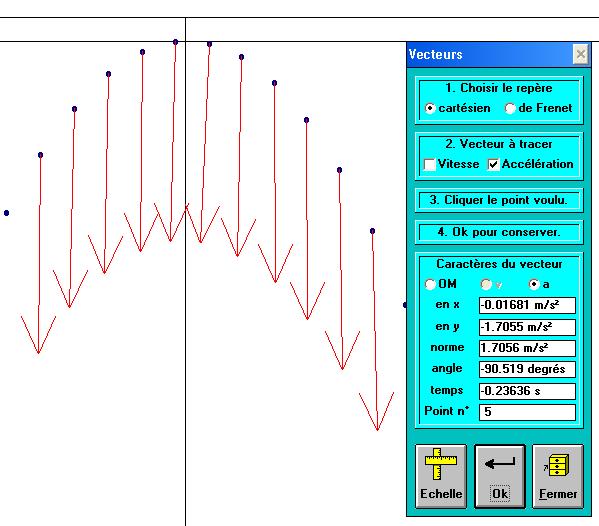
2)- Détermination de la direction et du sens du vecteur accélération aux temps t5 et t14.
- Rechercher les valeurs de vi – 1 et vi + 1 à l'aide de l'ordinateur.
![]() Tracer le représentant du vecteur
Tracer le représentant du vecteur
![]() à partir du point Gi.
à partir du point Gi.
|
Deuxième étape de l' animation : Méthode 2 Tracer le représentant du vecteur
|
- Le vecteur accélération a même direction et même sens que le
vecteur
![]()
3)- Détermination de la valeur a i du vecteur accélération au temps t i.
![]() Mesurer la longueur du représentant de
Mesurer la longueur du représentant de
![]() .
.
- À l'aide de l'échelle, donner la valeur de ΔvG en m / s.
- Diviser ΔvG par Δt = 2 τ et en déduire la valeur de l'accélération ai. Attention aux unités.
- En quelle unité s’exprime la valeur de l’accélération ?
- La valeur de ΔvG en m / s :
- ΔvG ≈ 0,162 m / s.
- La valeur de l'accélération a i :
-
- La valeur de l’accélération s’exprime en m / s ².
|
Troisième étape de l'animation |
4)-
Tracer le vecteur
![]() Échelle :
1 m / s2
↔ 2 cm.
Échelle :
1 m / s2
↔ 2 cm.
- Longueur du représentant : ℓa ≈ 3,66 cm.
![]() Déterminer les coordonnées cartésiennes du vecteur accélération.
Déterminer les coordonnées cartésiennes du vecteur accélération.
- Conclusion.
- 
- 
- Il existe un écart entre la valeur expérimentale de l’accélération et la valeur théorique.
- Cela provient de la précision sur la valeur de l’angle α.
- De plus, il est préférable de faire un traitement statistique de l'ensemble des valeurs de l'accélération.
- On peut remarquer que le vecteur accélération est pratiquement le même au cours du temps.
- Conclusion :
V-
Équation des différentes courbes. (si le temps le permet)![]()
|
à l'aide de l'ordinateur, on peut étudier les variations des coordonnées du vecteur position, du vecteur vitesse et du vecteur accélération en fonction du temps et d'en déduire les équations horaires. |
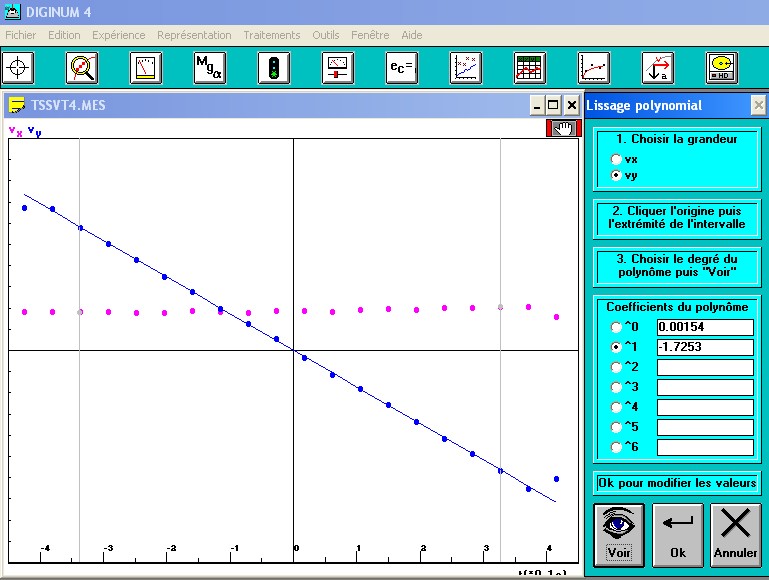
1)- équations horaires des coordonnées du vecteur accélération.
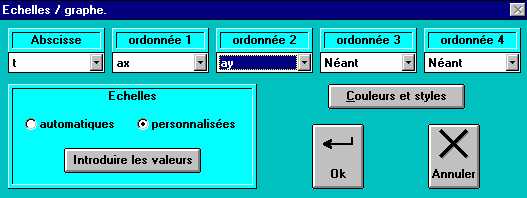
- Étudier les fonctions ax = f2 (t) et ay = g2 (t).
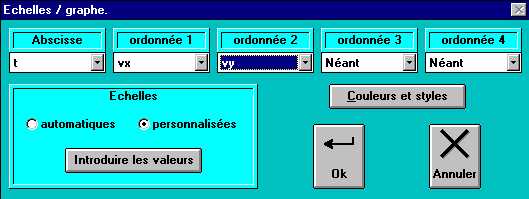
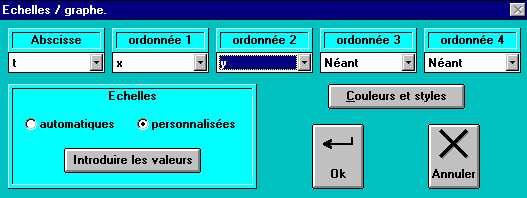
- Cliquer sur l'icône
![]() échelle
/ GRAPHE, mettre
t
en abscisse,
ax
en ordonnée 1 et
ay
en ordonnée 2.
échelle
/ GRAPHE, mettre
t
en abscisse,
ax
en ordonnée 1 et
ay
en ordonnée 2.
- Faire un traitement statistique (icône
ajustement)
![]() et
donner les relations :
ax =
f2 (t) et
ay = g2 (t).
et
donner les relations :
ax =
f2 (t) et
ay = g2 (t).
- Lors du traitement statistique, il faut choisir l'intervalle afin d'éliminer les valeurs extrêmes dont le calcul est faux.
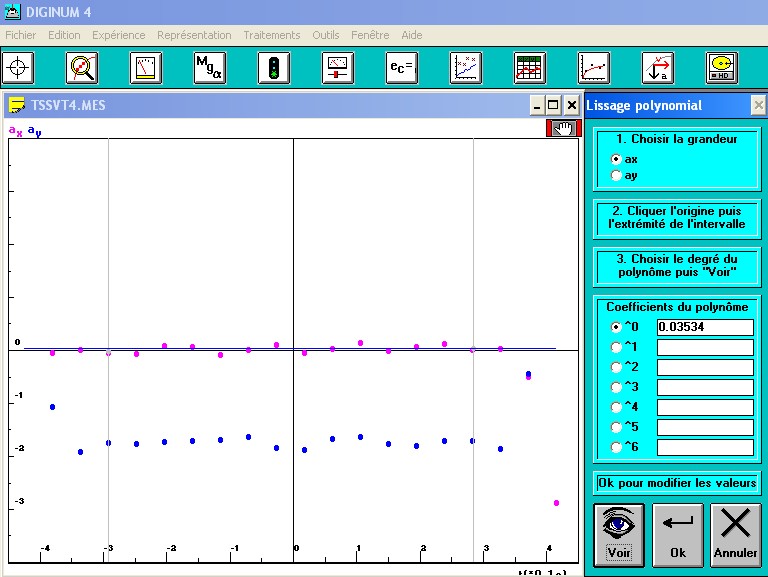
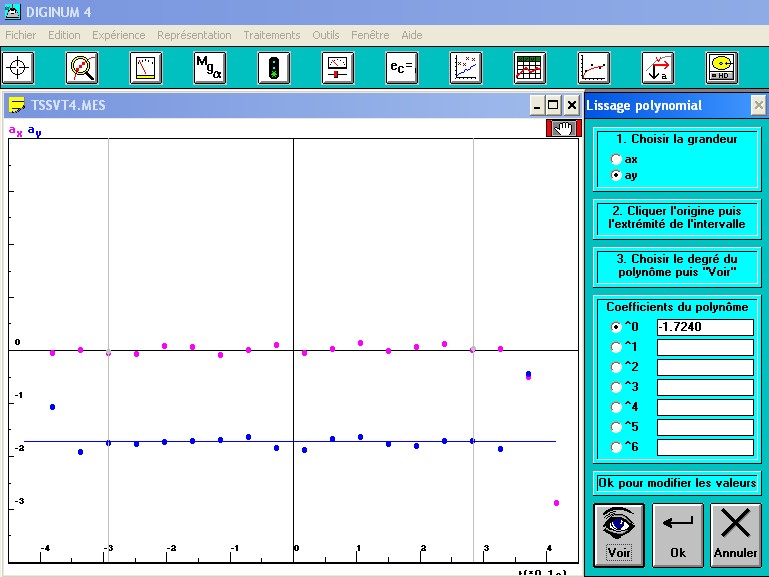
- Coordonnées du vecteur accélération.
-
On travaille dans le
repère
car le mouvement du mobile se fait sur le plan incliné :
|
|
ax
≈ 0 m . s–2 |
|
ay
≈ – 1,72 m . s–2 |
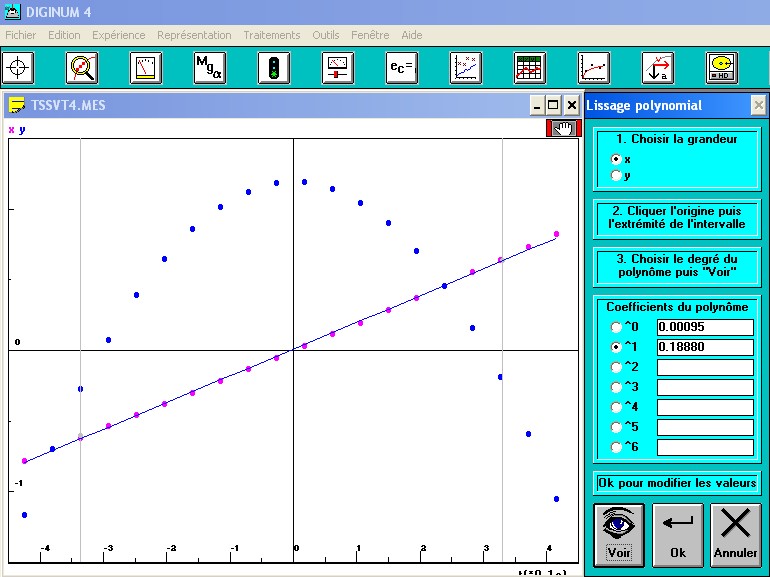
2)- Équations horaires des coordonnées du vecteur vitesse : vx = f1 (t) et vy = g1 (t).
- Idem.
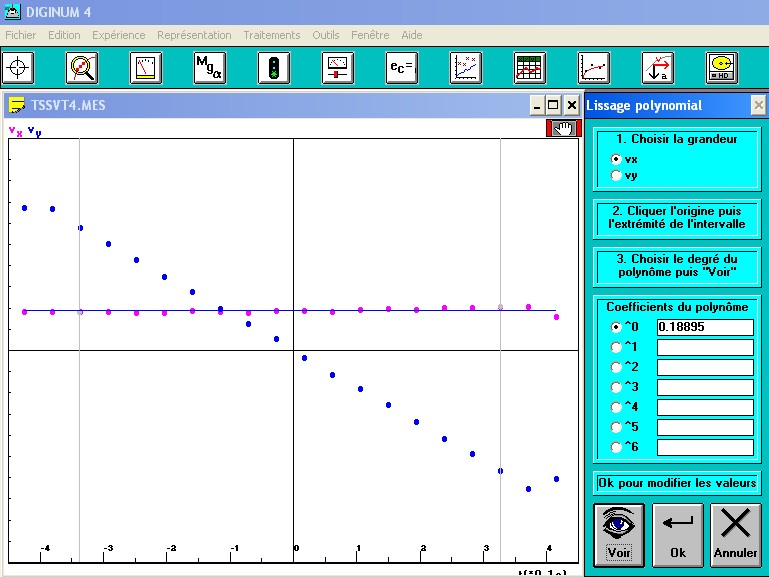
-
Coordonnées du
vecteur vitesse.
|
|
vx
≈ 0,19 m . s–1 |
|
vy
≈ – 1,73 . t
|
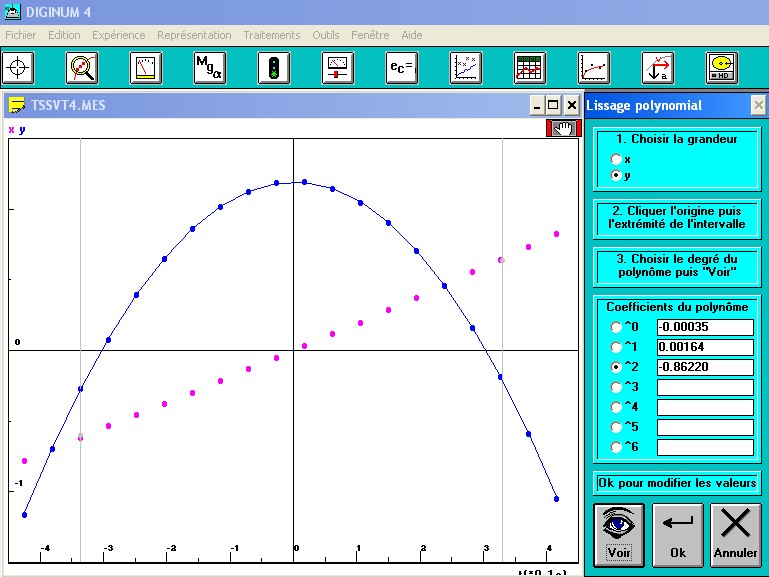
3)- Équations horaires des coordonnées du vecteur position : x = f (t) et y = g (t).
- Idem. Donner l'équation de la trajectoire du point mobile.
-
Coordonnées du
vecteur position
|
|
x
≈ 0,19 × t |
|
y
≈ – 0,86 × t2
|
Équation de la trajectoire du point mobile.
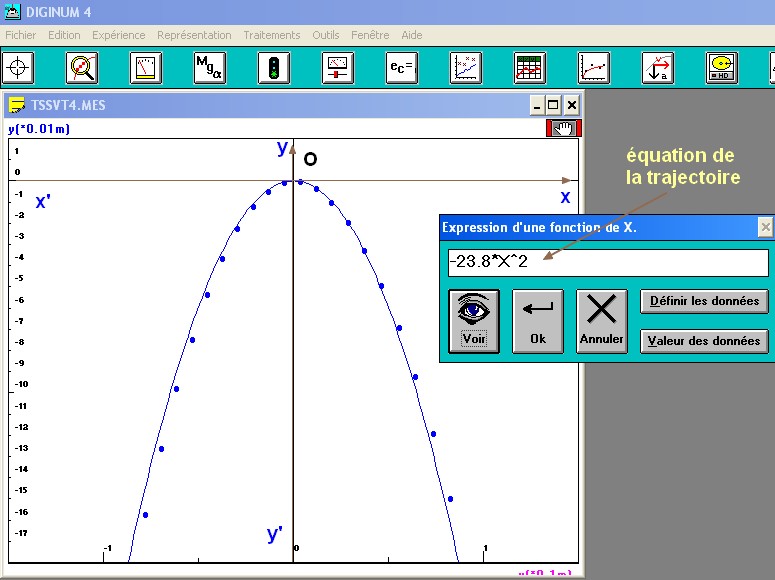
-
Équation de la trajectoire : y
≈ – 23,8 x2
-
On peut retrouver
ce résultat en exprimant
t en fonction de
x dans l’expression suivante :
|
|
x
≈ 0,19 × t |
|
y
≈ – 0,86 × t2
|
-
x
≈ 0,19 × t => t
≈ (x / 0,19)
-
On
remplace dans l’expression de l’ordonnée
y :
-
y
≈ – 0,86 × t2
=> y
≈ – 0,86 × (x / 0,19)2
-
y
≈ – 23,8 × x2
![]()