|
Phys. N° 04 |
Les Lois de Newton. Cours. |
|
Programme 2011 :
Physique et
Chimie
Programme 2020 :
Physique et
chimie
| QCM : |
|
Exercices : énoncé avec correction. |
|
1)- Exercice 5 page 84.
Appliquer
le principe d'inertie |
|
3)- Exercice 16 page 86. Chute d’une balle de ping-pong |
|
2)- Exercice 7 page 84. Préciser une situation expérimentale |
|
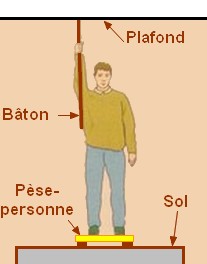
4)- Exercice 19 page 87. Interaction avec un pèse-personne |
Pour aller plus loin :
|
Mots clés : les lois de Newton ; principe de l'inertie ; actions mécaniques ; forces ; référentiel galiléen ; repère d'espace ; repère de temps ; référentiel géocentrique ; référentiel héliocentrique ; deuxième loi de Newton ; principe des actions réciproques ; ... |
|
|
I-
Première Loi de Newton : Le Principe de l’Inertie.![]()
Les Lois de Newton ont été formulées en 1687.
Elles constituent le fondement de la mécanique dite classique.
| Définition :
- Un référentiel dans lequel, le centre d’inertie d’un solide, soumis à des forces qui se compensent, est animé d’un mouvement rectiligne uniforme, est dit galiléen. Autre énoncé : - Un référentiel galiléen est un référentiel dans lequel le principe de l’inertie est vérifié. |
- Exemple :
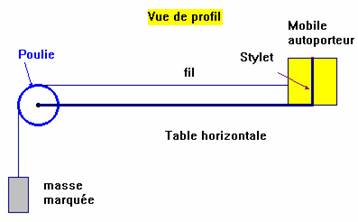
- On lance un mobile autoporteur sur une table horizontale.
- Le mobile est soumis à des actions mécaniques qui se compensent : le poids du mobile et la réaction de la table.
- On considère que les frottements sont négligeables.
![]()
- Lorsque cette expérience est réalisée dans le laboratoire, on remarque que le centre d’inertie du mobile autoporteur est animé d’un mouvement rectiligne uniforme.
- Si on réalise la même expérience dans un train qui freine, qui accélère ou qui prend un virage,
- On remarque que le centre d’inertie du mobile autoporteur n’est pas animé d’un mouvement rectiligne uniforme.
- Pourtant le mobile est toujours soumis à des actions mécaniques qui se compensent.
- Un train qui freine, qui accélère ou qui prend un virage ne constitue pas un référentiel galiléen.
- Un référentiel galiléen est un référentiel dans lequel le centre d’inertie d’un solide,
soumis à des forces qui se compensent, a un mouvement rectiligne uniforme.
- Un référentiel galiléen est un référentiel dans lequel le principe de l’inertie est vérifié.
- Un référentiel Terrestre est-il galiléen ?
-
-
- Pourtant on peut vérifier le principe de l’inertie sur Terre.
- Un référentiel terrestre est considéré comme galiléen avec une bonne approximation pour des expériences de courte durée.
- Pendant une durée très courte devant 24 h, on peut considérer
qu’un point de la surface de
- Tout référentiel, animé d’un mouvement rectiligne uniforme par rapport à un référentiel galiléen, est galiléen.
- Un train animé d’un mouvement rectiligne uniforme constitue un référentiel galiléen.
- Un objet animé d’un mouvement quelconque de constitue pas un référentiel galiléen.
![]()
2)- Choix du référentiel d’étude.
a)- Le référentiel terrestre :
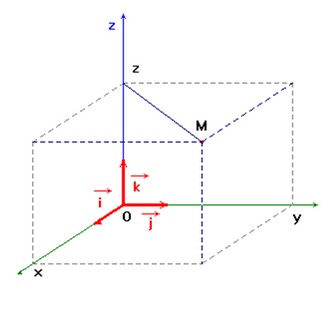
- Le référentiel terrestre ou référentiel du laboratoire.
- On utilise, le plus souvent, comme repère lié au référentiel terrestre, deux axes horizontaux et un axe vertical.
- Ce référentiel est bien commode pour l’étude du mouvement des objets dans une salle de classe, pour tous les mouvements qui s’effectuent au voisinage de la terre.
- Si l’expérience est suffisamment courte, on peut considérer
que ce référentiel est Galiléen avec une bonne approximation (précision de
l’ordre de 10−2 à 10−3).
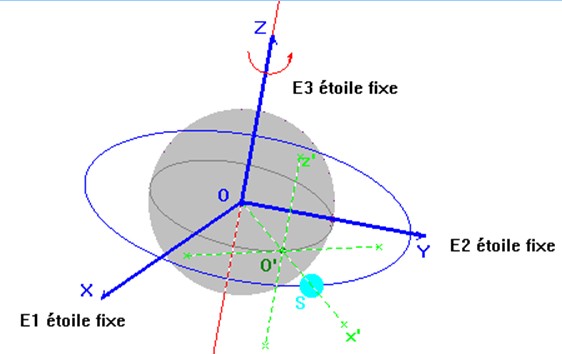
b)- Le référentiel géocentrique :
- C’est un solide imaginaire constitué par le centre T
de
- Le référentiel géocentrique est galiléen pour des durées d’étude inférieures à 365 j.
- Il n’est pas entraîné dans le mouvement de rotation de
-
- On peut considérer que les satellites de
- Ce référentiel est commode pour l’étude des satellites de la Terre.
- Ce référentiel n’est pas entraîné dans le mouvement de rotation de la Terre.
- Dans ce référentiel,
- on peut considérer que ce référentiel est Galiléen avec une bonne approximation ( précision de l’ordre de 10−3 à 10−4).
- L’origine du repère lié au référentiel Géocentrique est
située au centre de
-
- On peut choisir l’étoile polaire. Les axes x’Ox et y’Oy sont situés dans le plan équatorial et ils sont orientés vers des étoiles lointaines supposées fixes.
- Schéma :
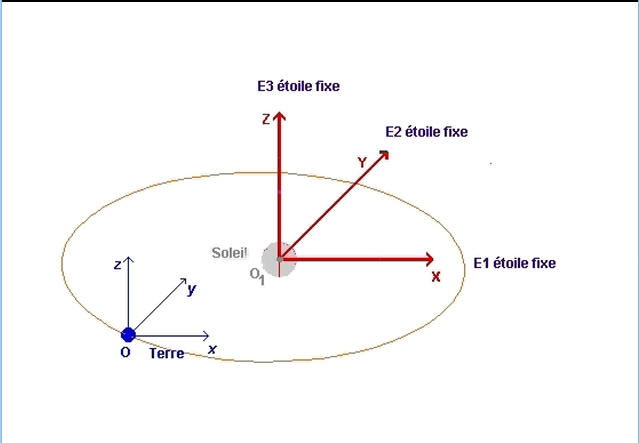
c)- Le référentiel Héliocentrique ou de Copernic.
- C’est un solide imaginaire constitué par le centre S du Soleil et de 3 axes d’origine S parallèles aux directions de trois étoiles lointaines fixes.
- Le référentiel héliocentrique est galiléen.
- On peut considérer que les planètes du système solaire ont un mouvement quasi circulaire uniforme dans le référentiel héliocentrique.
- L’origine du repère lié au référentiel Héliocentrique est située au centre du Soleil.
- Les axes z’Oz, x’Ox et y’Oy sont orthogonaux et ils sont orientés vers des étoiles lointaines supposées fixes.
- Ce référentiel est commode pour l’étude des satellites du Soleil.
- Dans ce référentiel,
- on peut considérer que ce référentiel est Galiléen avec une très bonne approximation (précision de l’ordre de 10−10).
- Schéma :


![]()
3)- Solide isolé ou pseudo-isolé.
- Un solide isolé est un solide soumis à aucune force.
- En réalité un solide isolé n’existe pas.
- Tout solide est soumis au moins à son poids sur Terre.
- Dans l’Univers, tout solide est soumis à des forces gravitationnelles.
- On définit le solide pseudo-isolé qui a un comportement analogue au solide isolé.
- Un solide est pseudo-isolé si les forces qui s’exercent sur lui se compensent, en conséquence :
-
Pour un solide pseudo-isolé, on écrit :
![]()
![]()
4)- Première loi de Newton : Principe de l’inertie.
|
- Énoncé du Principe de l'Inertie: - Dans un référentiel galiléen, si un solide est isolé ou pseudo-isolé, alors son centre d’inertie est : - Au repos (immobile) - Ou animé d’un mouvement rectiligne uniforme.- On écrit : |
|
- Énoncé de la réciproque du Principe de l'Inertie: - Dans un référentiel galiléen, si le centre d’inertie d’un solide est animé d’un mouvement rectiligne uniforme alors le solide est isolé ou pseudo-isolé - On écrit :
|
| Conclusion :
|
- Remarque :
- Ce principe ne régit que le mouvement du centre d’inertie d’un solide.
- Il ne donne aucun renseignement sur le mouvement des autres points du solide.
- Il n’indique pas si le solide tourne autour de son centre d’inertie.
II-
Approche de la deuxième loi de Newton. (En relation avec le TP
Physique N° 04).![]()
a)- Expérience 1.
- Un mobile autoporteur est placé sur une table à digitaliser horizontale.
- À l’instant t = 0 s, on lâche le mobile autoporteur.
- Il est entraîné dans son mouvement par la masse marquée qui est accrochée au fil.
- On enregistre la position du centre d’inertie G du solide à intervalles de temps égaux τ.
- Ceci est possible grâce à la table à digitaliser munie de son stylet.
- L’ordinateur enregistre la position du stylet à intervalle de temps régulier τ.
- La configuration choisie permet de sélectionner une vingtaine de points.
- Le document obtenu est à l’échelle 1.
- Schémas :

- Enregistrement : On obtient l’enregistrement suivant.

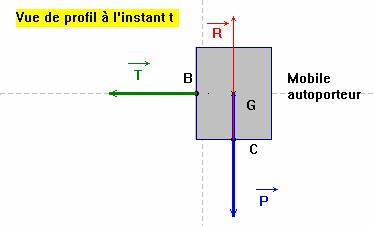
b)- Bilan des forces.
- Le mobile est soumis à son poids
![]() ,
la réaction du support
,
la réaction du support
![]() et la tension du fil
et la tension du fil
![]() .
.
- Schéma :
c)- Conclusions :
- Conséquence :
![]() , le solide n’est ni isolé, ni pseudo-isolé.
, le solide n’est ni isolé, ni pseudo-isolé.
- La résultante des forces extérieures appliquée au solide est différente
du vecteur nul :
![]()
- On remarque que le vecteur vitesse du centre d’Inertie
![]() garde
la même direction et le même sens au cours du mouvement.
garde
la même direction et le même sens au cours du mouvement.
- Par contre, la valeur de la vitesse change au cours du mouvement.
En conséquence le vecteur
![]() varie au cours du mouvement.
varie au cours du mouvement.
![]()
a)- Expérience 2 :
- Un mobile autoporteur est placé sur une table à digitaliser horizontale.
- Il est attaché à un point fixe O par l’intermédiaire d’un fil inextensible.
- À l’instant t = 0 s, on lance le mobile autoporteur fil tendu.
- On enregistre la position du centre d’inertie G du solide à intervalles de temps égaux τ.
- Schémas :


- Enregistrement : On obtient l’enregistrement suivant.

b)- Bilan des forces.
-
Le mobile est soumis à son poids
![]() , la réaction du support
, la réaction du support
![]() et la tension du fil
et la tension du fil
![]() .
.
- Schéma :
c)- Conclusions :
- Conséquence :
![]() , le solide n’est ni isolé, ni pseudo-isolé.
, le solide n’est ni isolé, ni pseudo-isolé.
- La résultante des forces extérieures appliquée au solide est différente
du vecteur nul :
![]()
- On remarque que le vecteur vitesse du centre d’Inertie
![]() garde
la même valeur.
garde
la même valeur.
- Par contre, la direction du vecteur vitesse change au cours du
mouvement. En conséquence le vecteur
![]() varie au cours du mouvement.
varie au cours du mouvement.
![]()
-
Lorsque la résultante
![]() des forces extérieures appliquées
à un solide est différente du vecteur nul, le vecteur vitesse du centre d’inertie
du solide varie au cours du mouvement.
des forces extérieures appliquées
à un solide est différente du vecteur nul, le vecteur vitesse du centre d’inertie
du solide varie au cours du mouvement.
- On remarque que la résultante
![]() des forces appliquées au solide
a même direction et même sens que le vecteur variation du vecteur vitesse du
centre d’inertie du solide
des forces appliquées au solide
a même direction et même sens que le vecteur variation du vecteur vitesse du
centre d’inertie du solide
![]() .
.
![]()
4)- Énoncé de la deuxième loi de Newton (niveau 1 S).
|
- Énoncé de la deuxième loi de Newton : - Dans un référentiel galiléen,si la somme vectorielle des forces extérieures appliquées à un solide n’est pas nulle
alors le vecteur vitesse du centre d’inertie du solide varie. À l’instant t, le vecteur variation du vecteur vitesse du centre d’inertieentre deux instants très proches encadrant l’instant t
et la résultante
|
- Remarques :
- Si
![]() est colinéaire à
est colinéaire à
![]() ,
seule la valeur de la vitesse varie.
,
seule la valeur de la vitesse varie.
- Si
![]() est perpendiculaire à
est perpendiculaire à
![]() ,
seule la direction du vecteur vitesse varie.
,
seule la direction du vecteur vitesse varie.
III-
Troisième loi de Newton : Principe des actions réciproques.![]()
|
Soient deux corps A et B. A est situé au point O et B est situé au point P.
Lorsqu’un corps
A exerce sur un corps
B
une action mécanique représentée par le vecteur force
Le corps
B exerce sur un corps
A
une action mécanique représentée par le vecteur force
Les forces
|
- Remarque :
- Cette propriété est toujours vraie, que les corps soient au repos ou en mouvement.
![]()
- On accroche ensemble deux dynamomètres.
- On remarque qu'ils donnent la même indication. Pourquoi ?
- On gonfle un ballon de baudruche, puis on le lâche. Expliquer.
![]()
3)- Mesure de la valeur du poids d'un corps à l'aide d'un dynamomètre.
- Le dynamomètre mesure aussi bien la force qu'il exerce que la force qu'on lui applique.
Représentation schématique :
|
|
|
|
- L'objet est en équilibre.
- D'après les conditions d'équilibre, on peut écrire que :
-
![]()
- Et que les deux forces ont la même droite d'action : P = F2 →1.
- Le dynamomètre est en équilibre et on considère qu'il a une masse négligeable.
- On peut écrire que :
- ![]()
- Et les deux forces ont la même droite d'action : F2 →1 = F3 →2.
- D'après le principe de d'interaction : F2 →1 = F1 →2.
- En conséquence : F2 →1 = F1 →2 = P
- Le dynamomètre mesure bien le poids de l'objet ceci lorsque le dynamomètre est immobile.
- Si le dynamomètre bouge cela n'est plus vrai.
- Remarque :
- La troisième loi de Newton est vérifiée que les forces soient de contact ou à distance et que les solides soient immobiles ou en mouvement.
![]()
4)- Application : Interaction de contact et propulsion.
Pourquoi pouvons-nous marcher ?
a)- Schématiser un personnage qui se déplace en marchant. Quelles sont les actions mécaniques qui s’exercent sur le marcheur ?
- Il y a l’action du sol sur le marcheur
![]() et action de la terre sur le
marcheur
et action de la terre sur le
marcheur
![]() .
.
b)- Représenter par des vecteurs forces l’action du sol sur ses pieds.
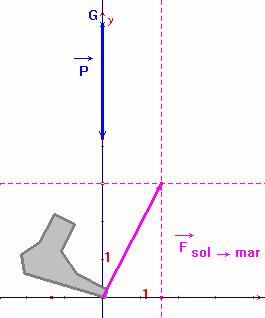
- On peut décomposer la force exercée par le sol sur le pied du marcheur par deux actions :
- La réaction normale au support qui empêche le pied de traverser le son ou de s’enfoncer dans le sol
et la réaction tangentielle qui empêche le pied de glisser en arrière.

c)- Les forces de frottement vous paraissent-elles indispensables au marcheur ?
- Parmi toutes les forces appliquées au marcheur, quelles sont celles qui favorisent son déplacement vers l’avant ?
- Qu’en est-il si le sol est parfaitement lisse ?
- Les forces de frottement sont indispensables.
- S'il n'y a pas de forces de frottement, le marcheur ne peut pas avancer.
- C’est grâce à la composante tangentielle
![]() que le marcheur peut avancer.
que le marcheur peut avancer.
- Si le sol est parfaitement lisse la valeur de la composante
![]() est faible et le marcheur glisse.
est faible et le marcheur glisse.
- Cette force de frottement qui empêche le marcheur de glisser sur le sol permet la propulsion du marcheur.
![]()
5)- Application : cas d’une voiture.
- Considérons une voiture (traction avant) qui tracte une caravane.
- Faire le bilan des forces extérieures agissant :
- Sur le système
:
Système S1 = {Voiture} ;
![]()
- Sur le système
:
Système S2 = {Caravane} ;
![]()
- Sur le système
: Système S3 = {Voiture : Caravane} ;
![]() .
.
- Le principe de l’inertie est-il vérifié ? Justifier.
![]()
|
Exercices énoncé avec correction. |
|
1)- Exercice 5 page 84.
Appliquer
le principe d'inertie |
|
3)- Exercice 16 page 86. Chute d’une balle de ping-pong |
|
2)- Exercice 7 page 84. Préciser une situation expérimentale |
|
4)- Exercice 19 page 87. Interaction avec un pèse-personne |
![]()